
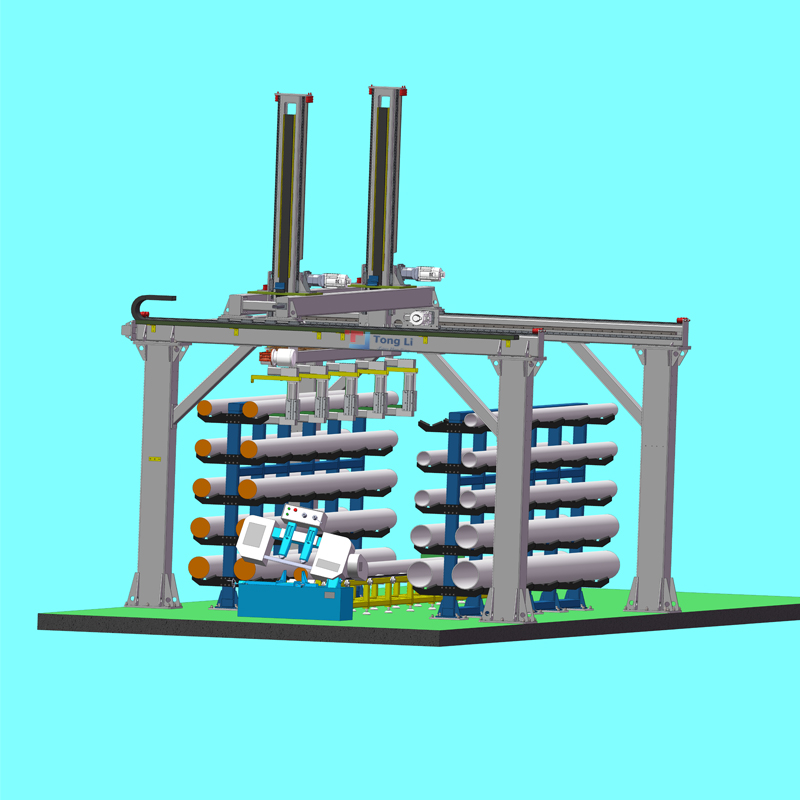
Sîstema manipulatora gantry ya depoya bar a jîr çareseriyeke hilgirtin û hilanîna materyalan a pir otomatîk e ku di pîşesaziya çêkirinê de bi berfirehî tê bikar anîn, nemaze di senaryoyên ku perçeyên xebatê yên dirêj ên wekî bar û lûleyan hewce ne ku bi bandor werin hilgirtin. Sîstem depoya jîr, hilgirtina otomatîk û teknolojiya bicihkirina rast bi hev re dike yek da ku karîgeriya hilberînê bi girîngî baştir bike, destwerdana destan kêm bike û rêjeyên xeletiyan kêm bike.
Pêkhateya sîstemê
1. Embara barê ya aqilmend:
Ji bo hilanîna bar an lûleyên bi taybetmendiyên cûda tê bikar anîn, bi gelemperî bi avahiyek refikê ya pir-qatî.
Bi pergaleke rêveberiya jîr ve hatiye sazkirin, ew dikare rewşa envanterê di wextê rast de bişopîne, cîhên hilanînê bixweber veqetîne, û rêyên gihîştinê çêtir bike.
Piştgiriya teknolojiyên nasnameya otomatîk ên wekî barkod û RFID dike da ku şopandina materyalê pêk were.
2. Manîpulatorê truss:
Manîpulatorê truss alavên sereke yên destgirtinê yên sîstemê ye, bi gelemperî ji sê eksenên X, Y, û Z pêk tê, û dikare di qada sê-alî de bi awayekî rast tevbigere.
Dawîya manipulatorê bi amûrek taybetî ve hatî çêkirin ku dikare bi barên bi şikl û mezinahîyên cûda re xwe biguncîne.
Motorên servo yên rastbûna bilind û pergalên kontrolê aramî û rastbûna pêvajoya destgirtinê misoger dikin.
3. Sîstema kontrolê:
PLC (Kontrollera Mantîqa Bernamekirî) an jî komputera pîşesaziyê wekî yekîneya kontrola bingehîn tê bikar anîn.
Algorîtmaya aqilmend a entegrekirî ji bo pêkanîna plansaziya rêya otomatîk, dûrketina ji astengiyan, hevsengkirina barê û fonksiyonên din.
Piştgiriya dockingê bi sîstema MES (Sîstema Darvekirina Çêkirinê) an ERP (Plansazkirina Çavkaniya Karsaziyê) re bikin da ku veguhestina bênavber a daneyên hilberînê pêk were.
4.Sîstema sensor û tespîtkirinê:
Ji bo çavdêriya rast-dem a pozîsyona robot, rewşa materyal û guhertinên hawîrdorê, bi cûrbecûr sensoran (wek sensorên fotoelektrîkî, dûrbînên lazer, û hwd.) ve hatî çêkirin.
Sîstema tespîtkirinê di dema desteserkirinê de ewlehî û rastbûn garantî dike da ku ji pevçûn an zirara maddî dûr bikeve.
5. Navrûya mirov-makîneyê (HMI):
Navrûyek xebitandinê ya hêsan peyda dike da ku operatoran ji bo şopandina rewşa xebitandina pergalê, sererastkirina parametreyan an çareserkirina pirsgirêkan hêsan bike.
Piştgiriya çavdêrîkirin û xebitandina ji dûr ve bikin da ku nermbûn û domdariya pergalê baştir bikin.
Fonksiyonên sîstemê
1. Hilanîn û vegerandina otomatîkî:
Li gorî hewcedariyên hilberînê, taybetmendiyên diyarkirî yên materyalê barê bixweber ji depoya materyalê barê têne derxistin, an jî materyalê barê yê pêvajoyî dîsa di depoyê de tê hilanîn.
Piştgiriya hilanîn û hilgirtin û birêvebirina cûrbecûr û taybetmendiyên materyalan ên tevlihev dike.
2. Cihê rastîn:
Bi rêya sensor û pergalên kontrolê yên rastbûna bilind, piştrast bikin ku manipulator dikare bi rastî materyalê barê bigire û bi cîh bike.
Ji bo senaryoyên pêvajoyê yên rastbûna bilind, wek barkirin û dakêşandina makîneyên CNC, tê sepandin.
3. Bernamekirina aqilmend:
Li gorî plana hilberînê û rewşa envanterê, rêza û rêya hilgirtina materyalan bixweber têne çêtirkirin da ku dema li bendê û xerckirina enerjiyê kêm bikin.
Piştgiriya sererastkirina dînamîk bikin da ku li gorî hewcedariyên guherbar ên xeta hilberînê biguncin.
4. Parastina ewlehiyê:
Bi gelek mekanîzmayên parastina ewlehiyê, wekî rawestandina awarte, tespîtkirina pevçûnê, alarma zêdebarkirinê, û hwd., ve hatî çêkirin, da ku ewlehiya alav û personelan were misoger kirin.
Li gorî standardên ewlehiya pîşesaziyê (wek ISO 13849) tevbigerin.
5. Rêvebiriya daneyan:
Gihiştina materyalan, birêvebirin û hilberandina daneyan di wextê rast de tomar bike, û raporên ji bo karmendên rêveberiyê çêbike da ku analîz bikin.
Piştgiriya hilanîn û analîzkirina ewr a daneyan bike da ku bingehek ji bo çêtirkirina hilberînê peyda bike.
Dema şandinê: 24ê Sibatê 2025